产品设计
ddos
Table API
网络技术
亚马逊证书
技术美术
g++
DDPM
样本熵
天猫
wx.checkSession
征文
fastapi
QSS
LabVIEW编程
Mycat
qemu
翻译
Java培训
模型转换
DJI
2024/4/12 1:05:11NAZA连接不上win10及win10下安装dji驱动问题
**更:**评论区和私信许多小伙伴询问驱动下载地址 NAZA软件:https://www.dji.com/cn/downloads/softwares/assistant-naza-m-lite 驱动包:https://www.dji.com/cn/downloads/softwares/other-dji-win ————————————————————…
DJI ROS dji_sdk 源码分析|整体框架
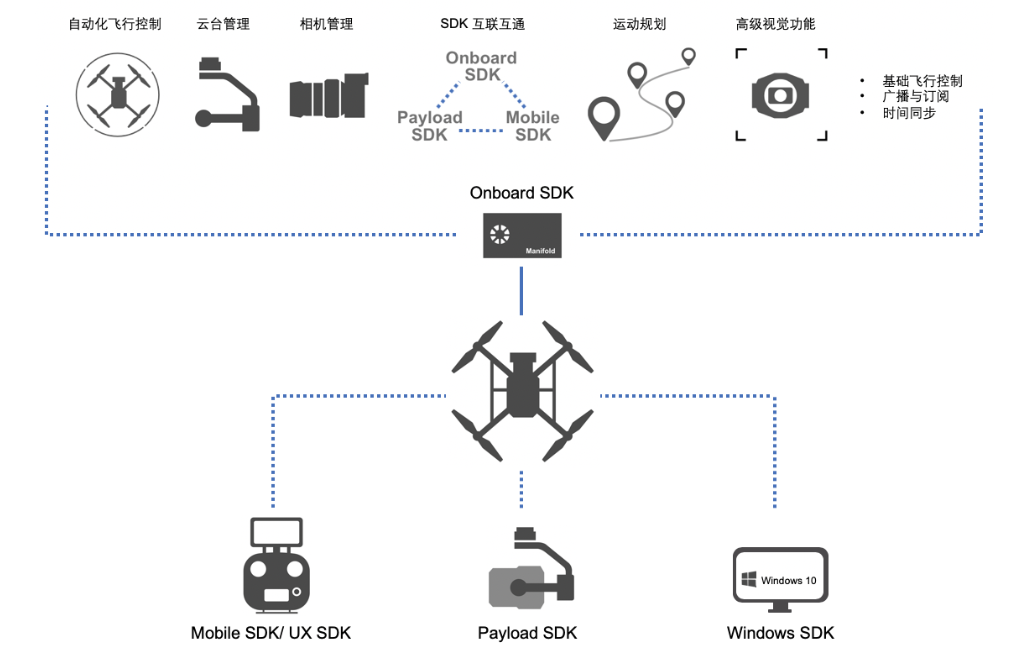
DJI ROS dji_sdk 源码分析|整体框架launch文件CMakeLists.txtcpp文件main.cppOSDK 是一个用于开发无人机应用程序的开发工具包,基于OSDK 开发的应用程序能够运行在机载计算机上(如Manifold 2),开发者通过调用OSDK 中指定的接口能够…

dji esdk开发(2)订阅实时视频流
文章目录 1、主要接口介绍1.1、订阅码流服务状态1.2、初始化、开始、和结束订阅码流1.2.1、订阅码流初始化1.2.2、开始码流传输1.2.3、停止码流传输1.3、设置负载相机码流源2、测试2.1、获取RGB图像2.1.1、解码部分2.1.2、完整测试代码如下2.2、目标检测并显示2.2.1、解码部分2…
dji esdk开发(1)Edge SDK 简介、配置demo运行
DJI 为支持开发者在机场端部署边缘计算服务及设备,提供了开发工具包 Edge SDK(即 ESDK),方便开发者利用大疆机场上如电源、通讯链路及媒体数据等资源。
不同于机载PSDK,开发者使用ESDK仅需要通过局域网络连接即可机场通信,支持拉取无人机的媒体文件、订阅无人机实时码流…
dji uav建图导航系列(三)模拟建图、导航
前面博文【dji uav建图导航系列()建图】、【dji uav建图导航系列()导航】 使用真实无人机和挂载的激光雷达完成建图、导航的任务。
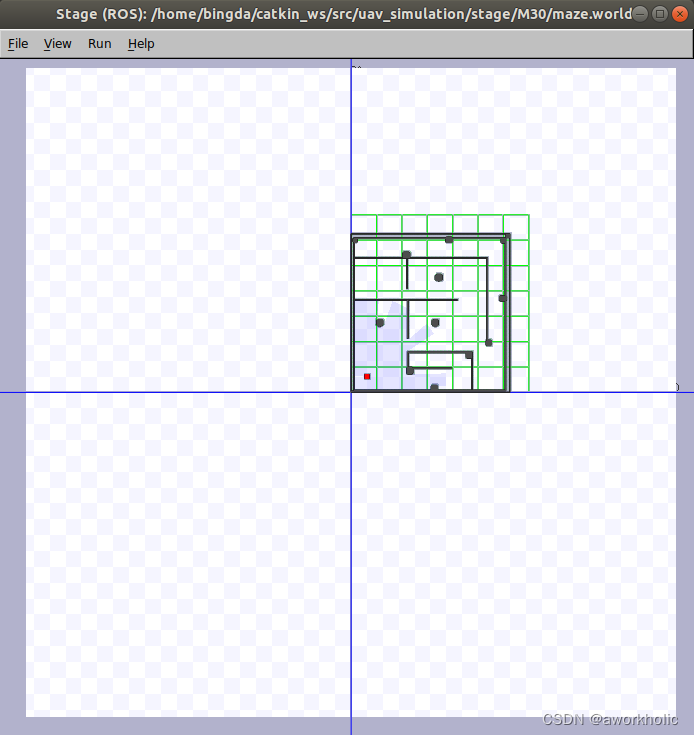
当需要验证某一个slam算法时,我们通常使用模拟环境进行测试,这里使用stageros进行模拟测试,实际就是通过模拟器,虚拟一个带有传感器(如…
dji uav建图导航系列()ROS中创建dji_sdk节点包(二)实现代码
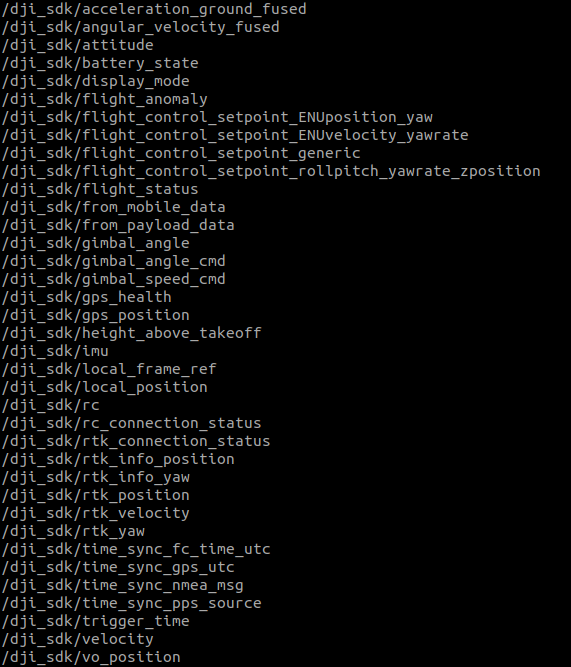
在前文 【dji uav建图导航系列()ROS中创建dji_sdk节点包(一)项目结构】中简单介绍了项目的结构,和一些配置文件的代码。本文详细说明目录src下的节点源代码实现。 文章目录 1、代码结构2、PSDK部分3、ROS部分3.1、头文件3.1.1、外部调用 node_service.h3.1.2、节点类定义…
dji psdk开发(9)第三方自定义 HMS 功能
文章目录 1、基本概念1.1、dji_hms_manager.h 模块定义1.2、dji_hms_customization.h 模块定义2、测试代码2.1、获取HMS信息2.1.1、测试代码2.1.2、测试结果运行图2.2、自定义HMS信息推送2.2.1、自定义一个 hms 数据库信息json表2.2.2、测试代码2.2.3、测试结果运行图3、存在问…
dji uav建图导航系列(二)导航
文章目录 1、导航节点launch文件1.1、节点参数1.2、模拟器节点1.3、无人机雷达-底盘节点1.4、地图服务器节点1.5、AMCL节点1.6、move_base节点1.7、rviz可视化节点2、导航测试2.1、导航实测2.2、动态参数配置 rqt_reconfigure1、导航节点launch文件
导航节点启动文件 uav_navi…
dji云哨aeroscope反制数据的解码、破解
文章目录 1、当前政策说明2、dji云哨aeroscope系统数据2.1、linux sdk和 web sdk2.1、数据结构定义2.1.1、无人机数据 SUavInfoInd sUavInfo2.1.2、主机数据SDeviceStatusInd sDevStatus3、云哨数据的破解3.1、工作流程3.2、udp数据3.3、tcp数据3.4、其他1、当前政策说明
2023…
dji uav建图导航系列()move_base
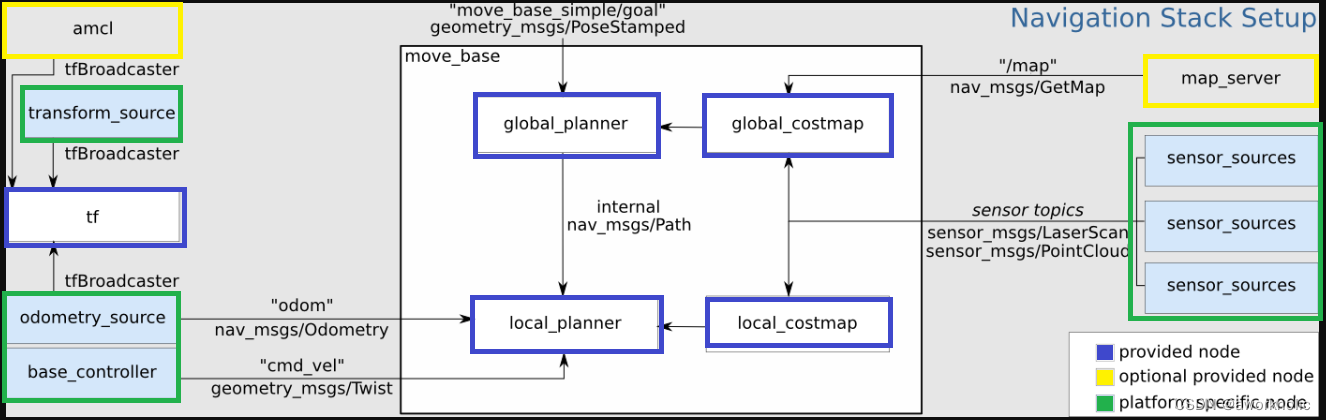
文章目录 1、导航框架2、move_base功能包3、amcl功能包4、代价地图的配置4.1、通用配置文件4.2、全局规划配置文件4.3、局部规划配置文件5、局部规划器配置6、launch文件1、导航框架
导航的关键是机器人定位和路径规划两大部分
move_base:实现机器人导航中的最优路径规划 am…
DJI 无人机Onboard SDK ROS 3.8.1 软件默认配置运行问题及解决方法
DJI 无人机Onboard SDK ROS 3.8.1 软件默认配置运行问题及解决方法连接设备启动SDKDJI Onboard SDK ROS 3.8.1是可以直接适配 M210飞机,但是对于A3飞控,由于没有双目相机,直接运行会报错,本篇博客记录遇到的问题,及解决…
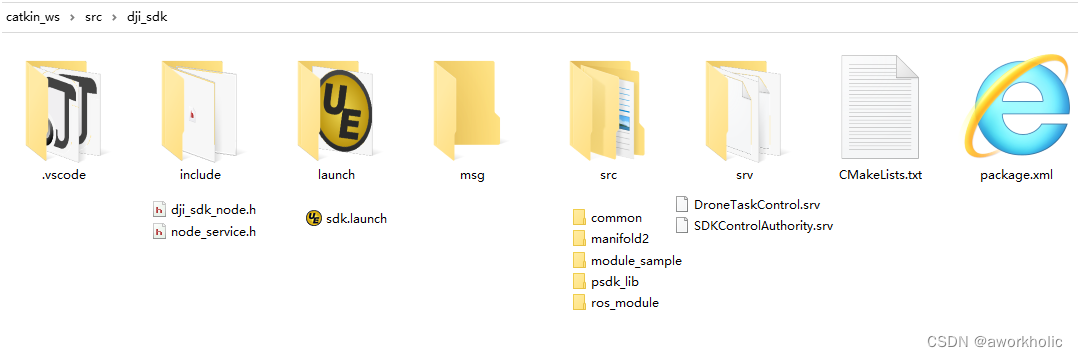
dji uav建图导航系列()ROS中创建dji_sdk节点包(一)项目结构
文章目录 1、整体项目结构1.1、 目录launch1.2、文件CMakeLists.txt1.3、文件package.xml1.4、目录include1.4、目录srv在ROS框架下创建一个无人机的节点dji_sdk,实现必需的订阅(控制指令)、发布(无人机里程计)、服务(无人机起飞降落、控制权得很)功能,就能实现一个类似…